
优傲协作机器人最受欢迎的应用是什么?虽然我们没有做过明确的统计,但是可以解决人体工程学难题,且性能强效率高的码垛应用,一定不会退出角逐。

2021年,优傲推出了增强型UR10e,有效载荷由最初的10kg提升至12.5kg,并保持售价不变,一跃成为码垛、机器看护和包装等应用的新选择。2022年,UR20的发布,将协作机器人的码垛能力进一步提升至20KG,在保持高精度和稳定性的前提下,将速度提高了一倍。
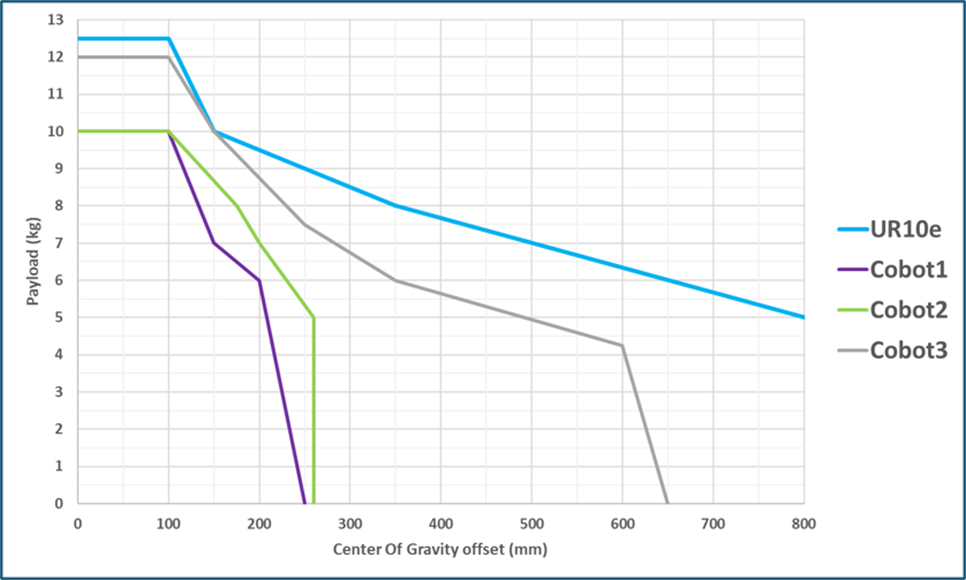
UR10e和同类产品偏心承载能力对比
越来越多的终用户实践得出,UR相较于行业内同型号的产品,拥有更强大的负载偏心承载能力,能承担更复杂更多样的码垛任务。结合UR+生态系统的码垛软件和应用套件,协作式码垛自动化的方式愈加多样。例如,UR+中国合作伙伴拓德科技基于优傲协作机器人研发的全自动柔性机器人码垛工作站,能够准确地按照规定的程序执行任务,高效地完成物品的包装、码垛和搬运等工作,从而提高生产效率、降低劳动成本,实现智能化生产。
以UR10e为例,本文将介绍如何通过参数设置,让UR机器人的负载能力发挥最大价值。
一、应用程序设置
1
TCP设置
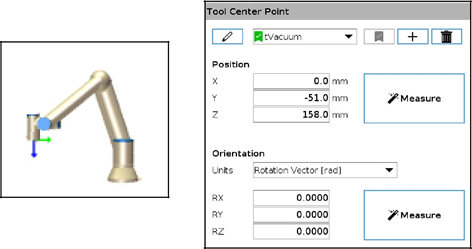
TCP需要被准确设置,不能直接引用默认值[0,0,0]。
2
重心(CoG) 和负载

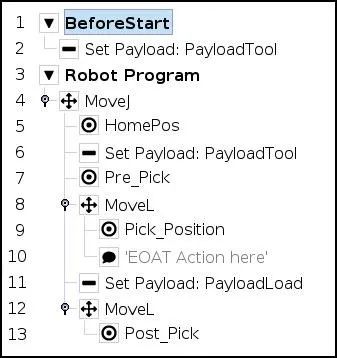
为了获得最佳性能,有效载荷和重心(CoG)同样需要被准确设置。对于有效负载发生变化的应用,可以使用“Set Payload”命令进行切换负载参数。
3
惯性力矩(MOI)
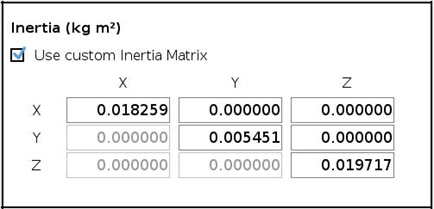
Polyscope输入自定义惯性矩阵
载荷的惯量在与工具法兰(原点在重心(CoG))对齐的坐标系中指定。默认惯性计算为用户指定质量的球体的惯性,质量密度为1g/cm³。通过选择“使用自定义惯性矩阵”可以设置自定义惯性设置。点击字段IXX, IYY, IZZ, IXZ, IYZ设置所选载荷的惯性,使用kg*m2的基本单位。
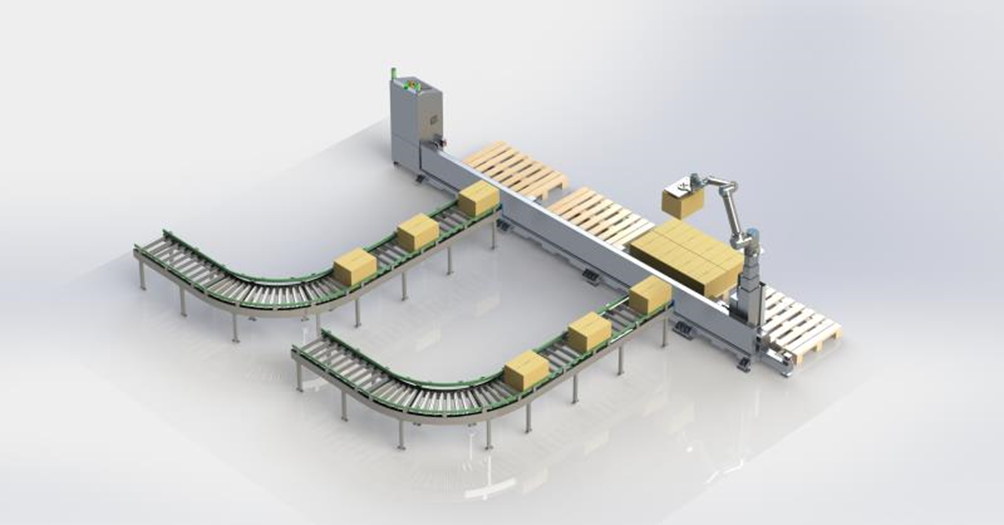
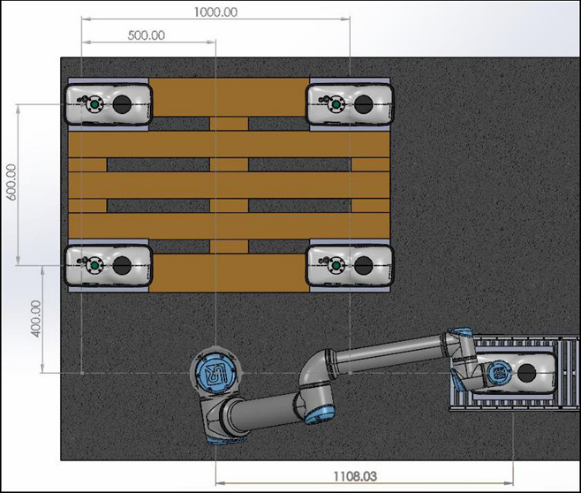
二、应用程序示例我们以一个典型的码垛应用为例,来看看如何利用参数设置,提高机器人的有效载荷。
机械布局如图所示。运动和设置参数如表格所示。
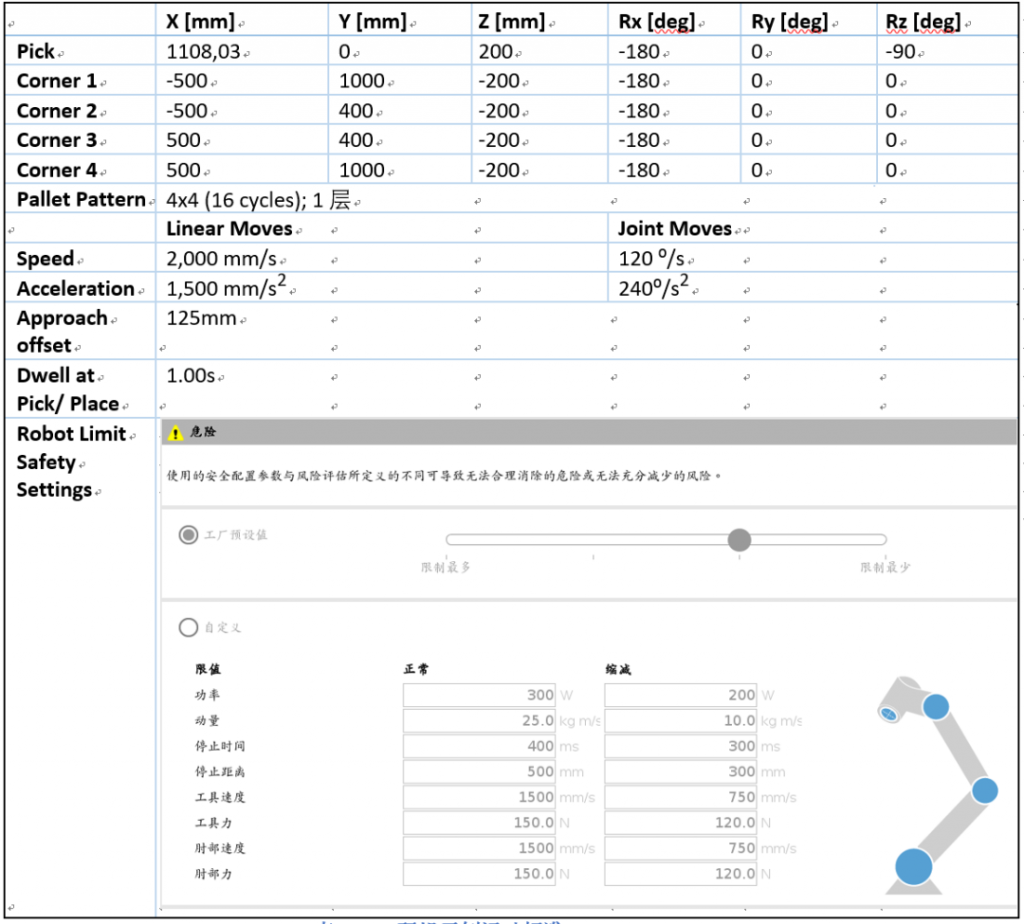
1
利用有效载荷曲线
图中,有效载荷曲线显示了与最大允许有效载荷相比CoG偏移的图形边界。
- 蓝色阴影边界的内部,允许无约束的机器人运动,也就是说机器人可以在其额定速度和加速度下运行。
- 相比之下,机器人在这个边界之外的运动会自动降低机器人的速度和加速度。
- 该图灰色区域,突出显示了UR10e上增加的有效负载额定值高达12.5kg。
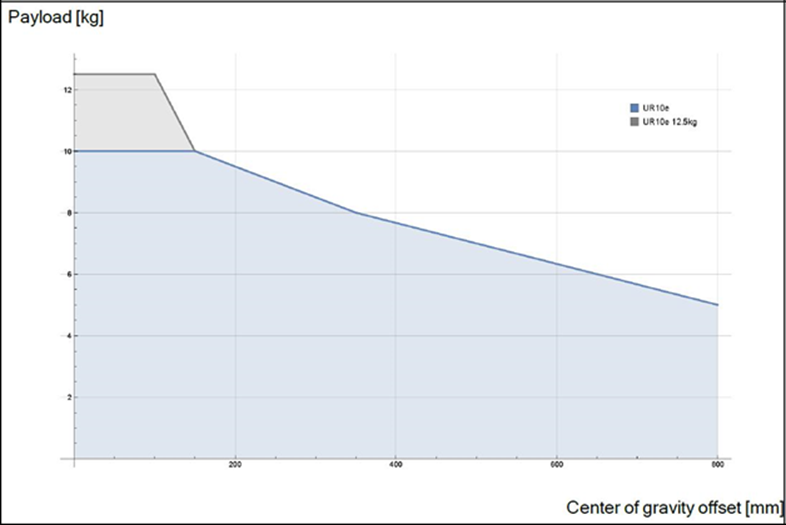
UR10e用户手册中的有效载荷曲线
① 计算重心偏移量。
重心(CoG)位置可以用几种方法计算。通常,这是通过3D建模程序(如SolidWorks)完成的,或者使用PolyScope中的本机有效负载向导完成的。
② 在SolidWorks中生成有效负载数据。
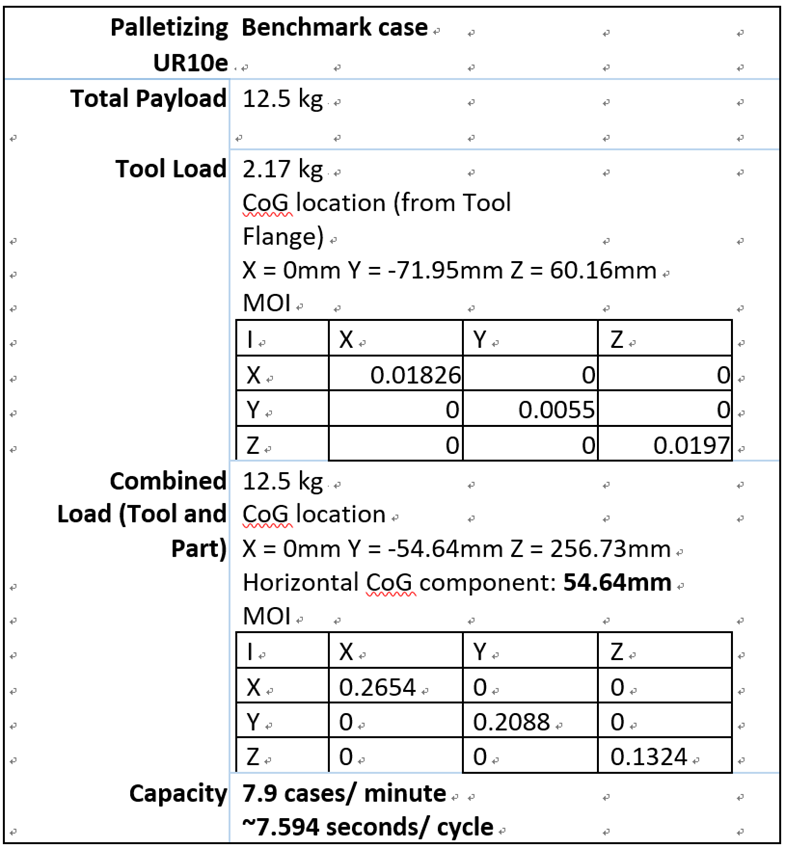
在这个示例中,我们使用SolidWorks Mass Properties评估工具来生成数据。表格分别显示了工具和有效载荷的质量属性。工具质量属性(参数)来自供应商的网站。该部件是一个通用的矩形,尺寸为200mm × 300mm × 280mm。

码垛示例的MOI数据
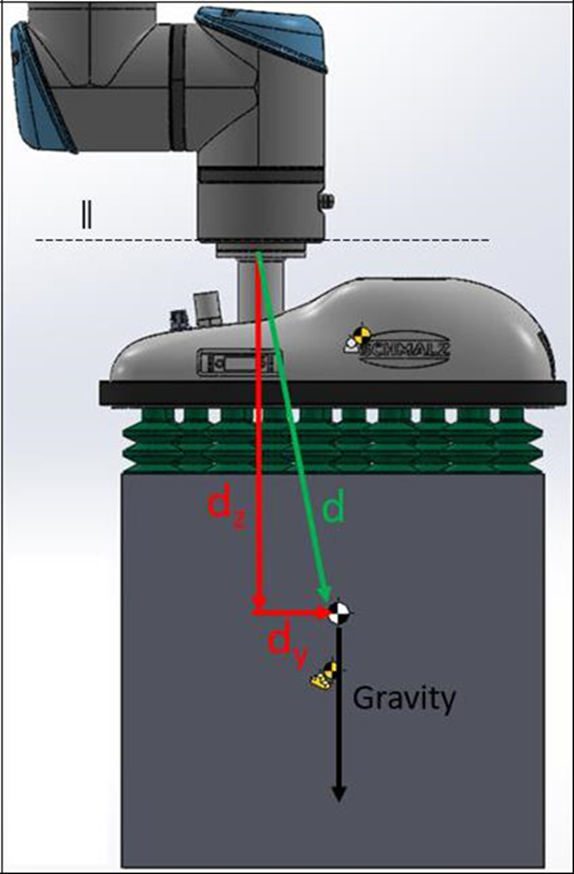
下图是由SolidWorks生成的3D模型。每个独立组件的CoG位置由黄色和黑色基准表示。组合组件的CoG位置由白色和黑色基准参考。同样值得注意的是重力的方向。
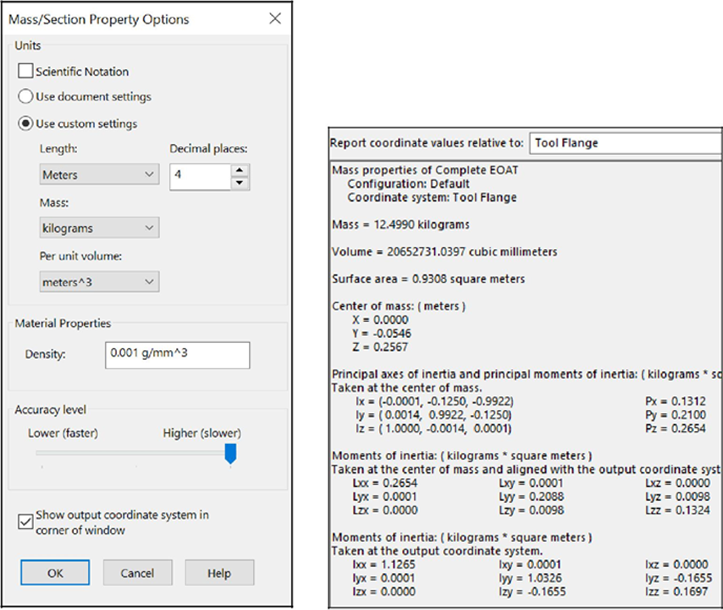
来自SOLIDWORKS的工具和有效载荷齿轮定位模型相关的质量属性可以直接通过Mass Properties evaluation 工具计算。一旦配置了软件中的度量单位,生成的值就用于有效负载设置。通过主窗口的“Options…”按钮可以访问MOI设置,如下图1所示。
一旦定义了单位,模型的质量属性就会显示在主窗口中,如下图2所示。这个数据可以直接输入到给定负载情况下的惯性矩阵中。
根据下图,CoG位置位于工具法兰坐标系中的(0,-0.0546,0.2567)米处。这些值作为图7所示的垂直(dz)和水平(dy) CoG组件插入到草图中。合成矢量显示为从工具法兰原点(262.48mm)的半径。
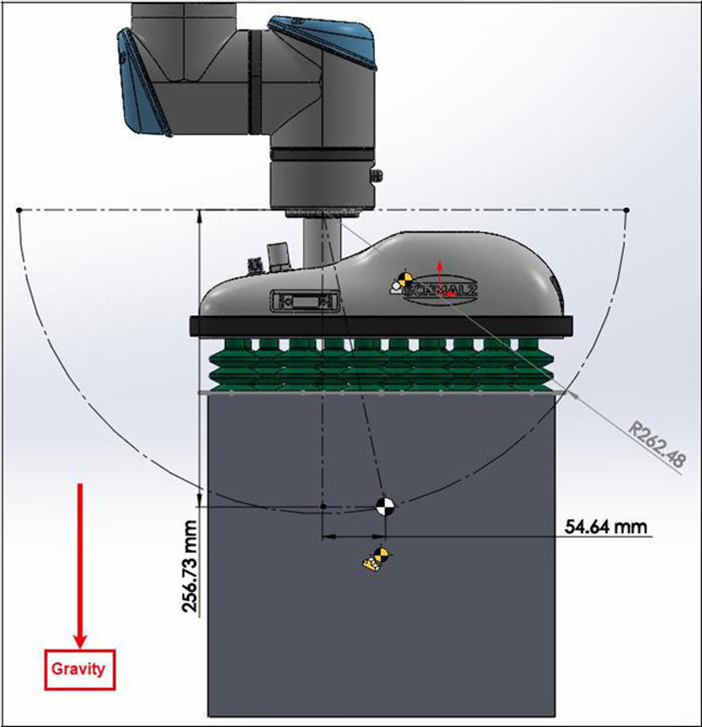
模型上绘制的COG位置
2
限制工具法兰定位
在设计更重的有效载荷时,目标是限制工具法兰原点的扭矩。因此,相对于重力,更小的垂直CoG偏移会降低这个值。在下图中,作用在工具法兰上的最大扭矩显示在给定负载情况下。如果将这种情况绘制到有效载荷曲线上,有效载荷将在阴影区域之外。
模型上绘制的COG位置
在这部分值得注意的是工具的方向特征,它用于限制工具法兰的角度。作为安全配置的一部分,建议在编程之前应用这些配置。一旦正确配置,该功能可以防止意外的停止或故障。
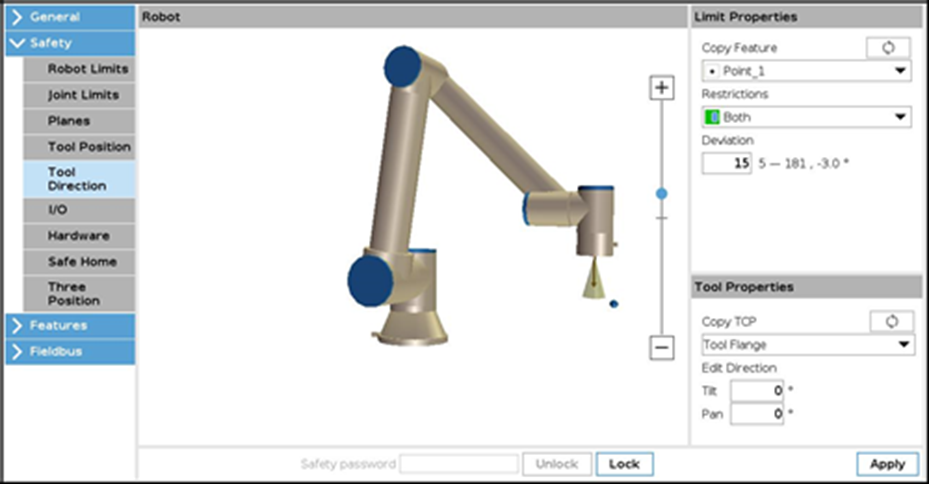
工具方向配置
3
利用CoG偏移参考有效载荷曲线
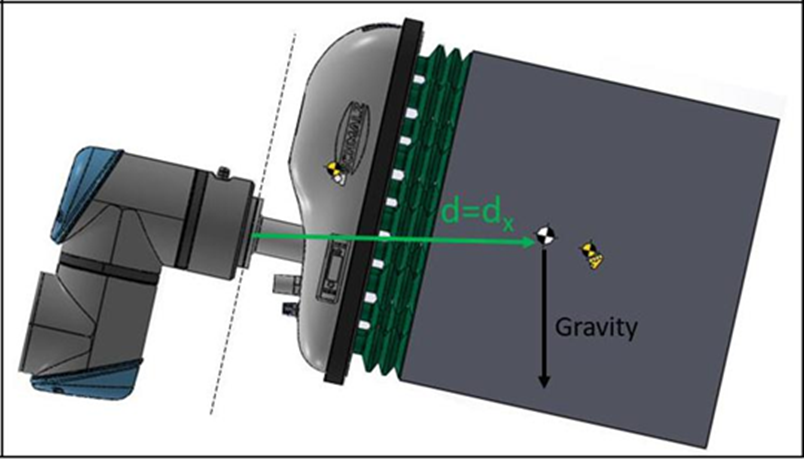
在这个案例中, CoG偏移位置垂直于重力的分量为Y分量(54.64mm)。在有效载荷曲线上绘制12.5kg和54.64mm的值,交叉红点仍在阴影区域内,表明该负载可以被接受。
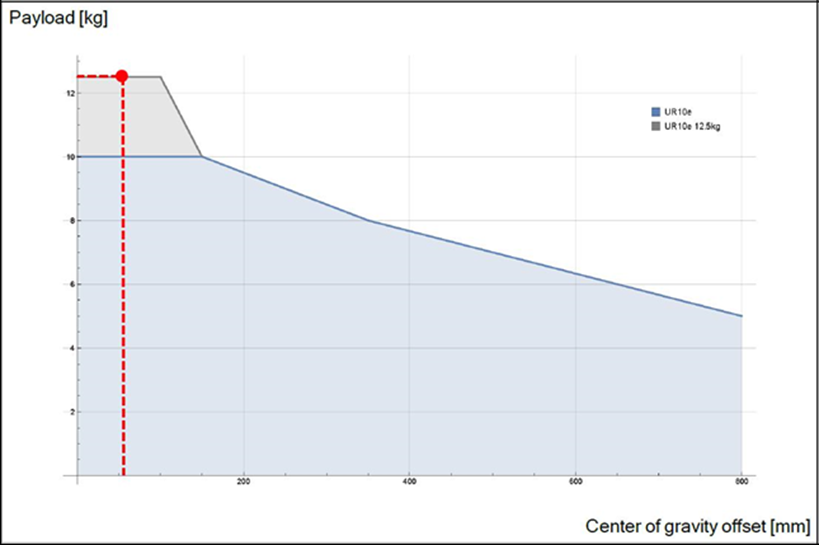
组合有效载荷水平分量的最大有效载荷
下图就是案例中通过UR离线模拟器工具显示码垛的应用结果。UR离线模拟器可以在UR的支持网站UR support site 上找到。
码垛实例仿真结果
优傲机器人即便产品迭代升级,也依然兼容UR+软硬件外围设备生态系统产品,支持即插即用,确保用户可以快速轻松地启动协作应用程序。
优傲时刻在倾听市场反馈、用户心声,也在不断发掘产品新的潜能。在码垛应用上,通过提升机器人的有效载荷,赋予了它全新的部署能力,以适应更多产线的生产需求,优化生产效率、质量和成本控制,加速企业的投资回报。
往期推荐
